Autonomous Drone Racing
Developed an autonomous navigation pipeline for a Crazyflie quadrotor to complete a course gate as fast as possible.
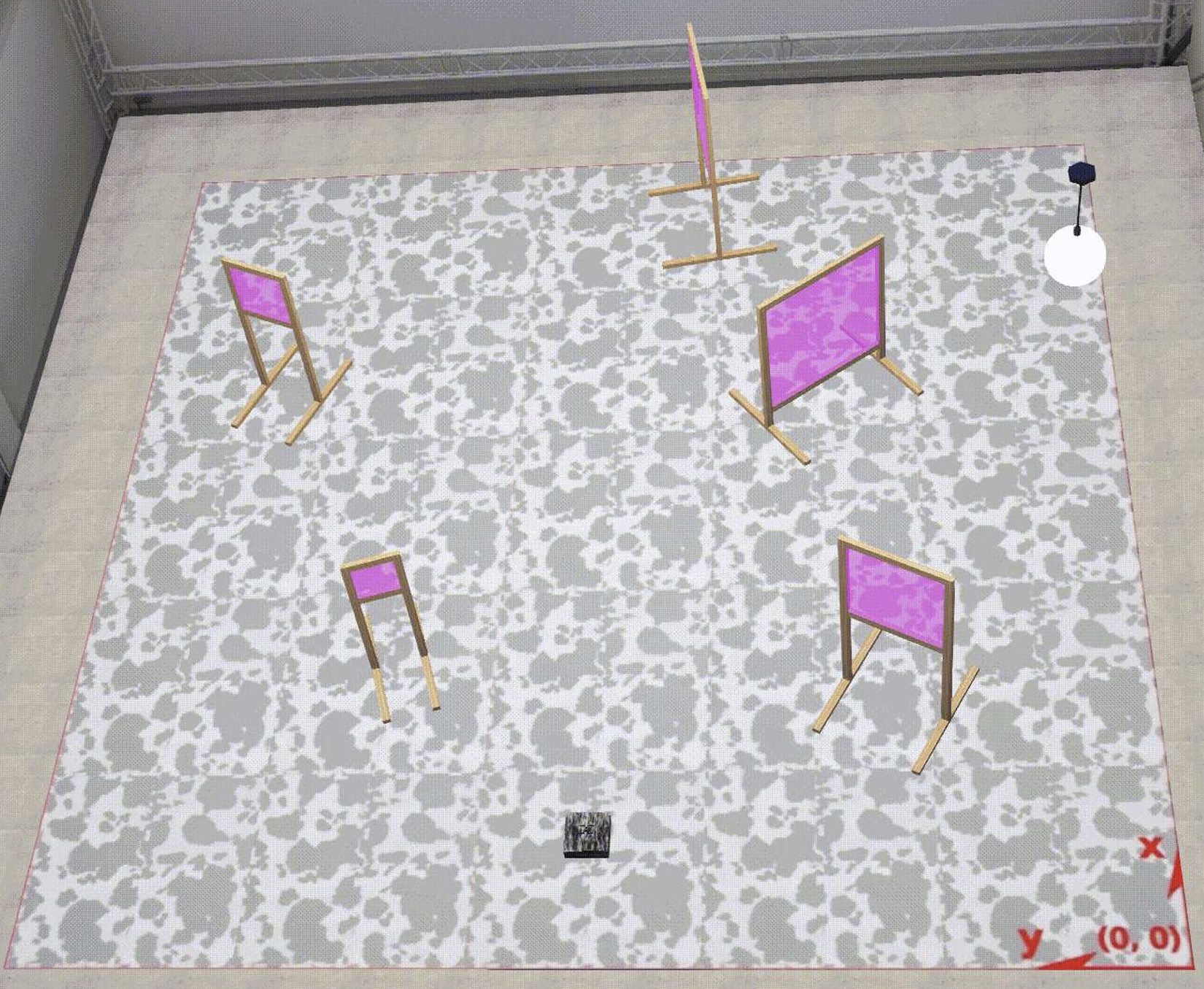
In simulation (Webots), implemented a computer vision-based gate detection during the 1st lap using OpenCV, followed by high-speed trajectory tracking once gate positions were identified.
Designed and tuned PID controller to ensure stable flight through randomly placed gates.
Transfered and retuned the algorithms from simulation to real Crazyflie hardware.