Thymio robot
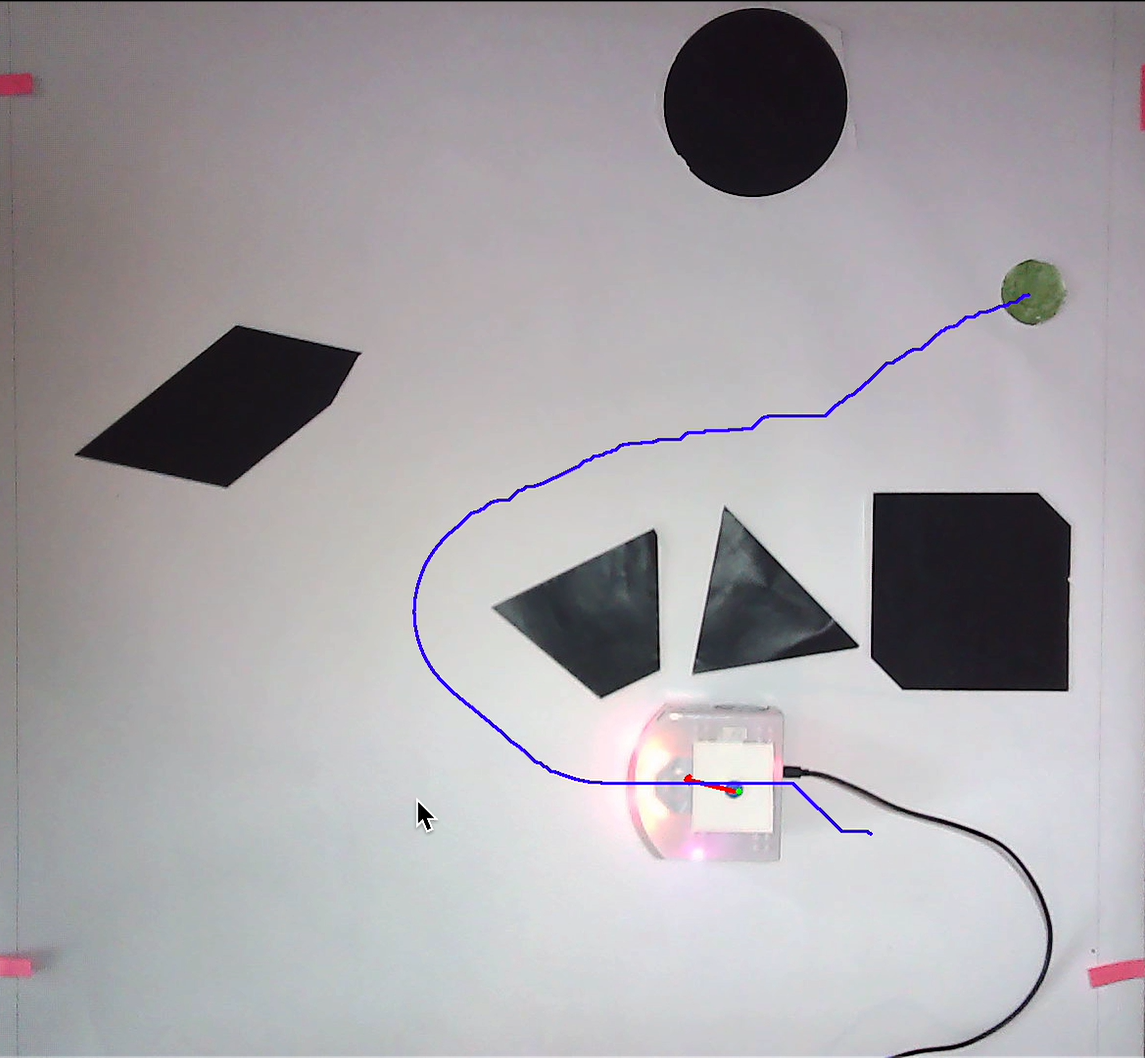
Built a complete autonomous navigation system for a Thymio robot as part of the EPFL Basics of Mobile Robotics course. The system detects the robot's pose from an overhead camera, plans an optimal path through a mapped environment using A* and navigates to the goal with real-time 3D obstacle avoidance.
State estimation combines camera observations and wheel odometry through an Extended Kalman Filter, keeping the robot localized even when the camera is temporarily unavailable.